Contrôleur de pilote de moteur sans balais ZLTECH 24V-36V 5A DC Modbus RS485 pour AGV


















FONCTION ET UTILISATION
1 mode de réglage de la vitesse
Régulation de la vitesse d'entrée externe : connectez 2 bornes fixes du potentiomètre externe au port GND et au port +5 v du pilote respectivement.Connectez l'extrémité de réglage à l'extrémité SV pour utiliser le potentiomètre externe (10K ~ 50K) pour régler la vitesse, ou via d'autres unités de contrôle (telles que PLC, micro-ordinateur monopuce, etc.) entrée tension analogique à l'extrémité SV pour réaliser la régulation de la vitesse (par rapport à GND).La plage de tension d'acceptation du port SV est de DC OV à + 5 V, et la vitesse du moteur correspondante est de 0 à la vitesse nominale.
2 Commande de marche/arrêt du moteur (EN)
Le fonctionnement et l'arrêt du moteur peuvent être contrôlés en contrôlant l'activation et la désactivation de la borne EN par rapport à GND.Lorsque la borne est conductrice, le moteur tourne ;sinon le moteur s'arrêtera.Lorsque vous utilisez la borne marche/arrêt pour arrêter le moteur, le moteur s'arrête naturellement et sa loi de mouvement est liée à l'inertie de la charge.
3 Commande de marche avant/arrière du moteur (F/R)
Le sens de marche du moteur peut être contrôlé en contrôlant l'activation/la désactivation de la borne F/R et de la borne GND.Lorsque F/R et la borne GND ne sont pas conductrices, le moteur tournera dans le sens des aiguilles d'une montre (du côté de l'arbre du moteur), sinon, le moteur tournera dans le sens inverse des aiguilles d'une montre.
4 Échec du pilote
Lorsqu'une surtension ou une surintensité se produit à l'intérieur du pilote, le pilote entrera dans l'état de protection et cessera automatiquement de fonctionner, le moteur s'arrêtera et le voyant bleu du pilote s'éteindra.Le pilote déclenchera l'alarme lorsque la borne d'activation est réinitialisée (c'est-à-dire que EN est déconnecté de GND) ou que l'alimentation est coupée.Lorsque ce défaut se produit, veuillez vérifier la connexion du câblage avec le moteur ou la charge du moteur.
5 Port de communication RS485
Le mode de communication du pilote adopte le protocole Modbus standard, conforme à la norme nationale GB/T 19582.1-2008.Utilisant une communication de liaison série à 2 fils basée sur RS485, l'interface physique utilise un port de câblage à 3 broches conventionnel (A+, GND, B-), et la connexion série est très pratique.
Paramètres
| Chauffeur | ZLDBL4005S |
| Tension d'entrée(V) | 24V-36V CC |
| Courant de sortie(A) | 5 |
| Methode de CONTROLE | Modbus RS485 |
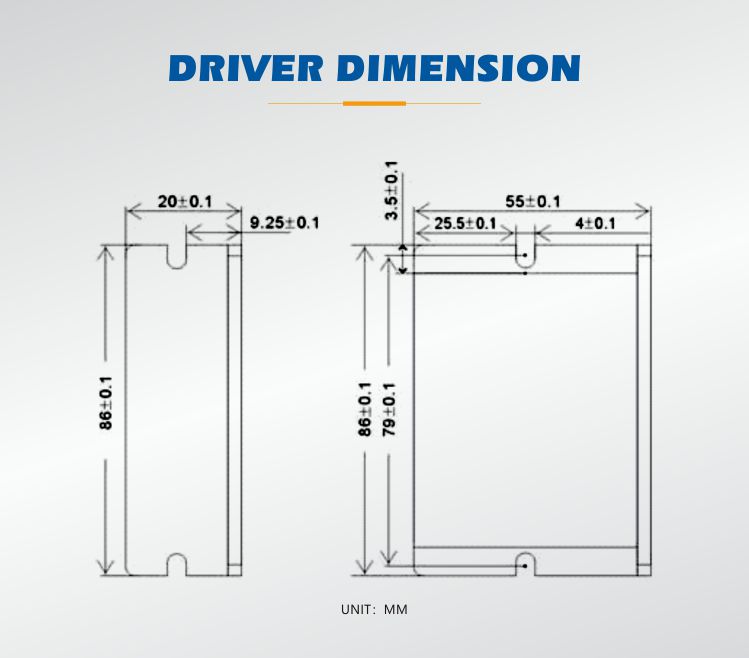
| Dimensions(mm) | 86*55*20mm |
| Poids (kg) | 0,1 |
Dimension
Application

Emballage

Dispositif de production et d'inspection

Qualification & Certificat

Bureau et Usine

Coopération

Catégories de produits
-

2S86 ZLTECH série 86 DC 36V 48V AC 27V-75V cl...
-

ZLTECH 24V-48V 30A Canbus Modbus double canal D...
-

Moteur de moyeu sans balai ZLTECH 15 pouces 200 kg DC avec...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V marchepied intégré...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

Moteur pas à pas intégré ZLTECH 57mm Nema23 avec d ...





