ZLTECH 3 phases 60mm Nema24 24V 100W/200W/300W/400W 3000 tr/min moteur BLDC pour machine d'impression








Un moteur électrique à courant continu sans balais (BLDC) est un moteur électrique alimenté par une alimentation en courant continu et commuté électroniquement au lieu de brosses comme dans les moteurs à courant continu conventionnels.Les moteurs BLDC sont plus populaires que les moteurs à courant continu conventionnels de nos jours, mais le développement de ce type de moteurs n'a été possible que depuis les années 1960, lorsque l'électronique à semi-conducteurs a été développée.
Similitudes des moteurs BLDC et DC
Les deux types de moteurs se composent d'un stator avec des aimants permanents ou des bobines électromagnétiques à l'extérieur et d'un rotor avec des enroulements de bobine pouvant être alimentés en courant continu à l'intérieur.Lorsque le moteur est alimenté en courant continu, un champ magnétique est créé dans le stator, attirant ou repoussant les aimants du rotor.Cela fait que le rotor commence à tourner.
Un commutateur est nécessaire pour maintenir le rotor en rotation, car le rotor s'arrêterait lorsqu'il serait aligné avec les forces magnétiques dans le stator.Le commutateur commute en permanence le courant continu à travers les enroulements et commute ainsi également le champ magnétique.De cette façon, le rotor peut continuer à tourner tant que le moteur est alimenté.
Différences moteurs BLDC et DC
La différence la plus importante entre un moteur BLDC et un moteur à courant continu conventionnel est le type de commutateur.Un moteur à courant continu utilise des balais de charbon à cet effet.Un inconvénient de ces brosses est qu'elles s'usent rapidement.C'est pourquoi les moteurs BLDC utilisent des capteurs - généralement des capteurs Hall - pour mesurer la position du rotor et une carte de circuit imprimé qui fonctionne comme un interrupteur.Les mesures d'entrée des capteurs sont traitées par la carte de circuit imprimé qui chronomètre avec précision le bon moment pour commuter lorsque le rotor tourne.
Paramètres
| Article | ZL60DBL100 | ZL60DBL200 | ZL60DBL300 | ZL60DBL400 |
| Phase | 3 phases | 3 phases | 3 phases | 3 phases |
| Taille | Nema24 | Nema24 | Nema24 | Nema24 |
| Tension (V) | 24 | 24 | 48 | 48 |
| Puissance nominale (W) | 100 | 200 | 300 | 400 |
| Courant nominal (A) | 5.5 | 11.5 | 8.3 | 12 |
| Courant de crête (A) | 16.5 | 34,5 | 25 | 36 |
| Couple nominal (Nm) | 0,32 | 0,63 | 0,96 | 1.28 |
| Couple maximal (Nm) | 1 | 1.9 | 3 | 3,84 |
| Vitesse nominale (RPM) | 3000 | 3000 | 3000 | 3000 |
| Nombre de pôles (paires) | 4 | 4 | 4 | 4 |
| Résistance (Ω) | 0,22 ± 10 % | 0,59 ± 10 % | 0,24±10% | |
| Inductance (mH) | 0.29±20% | 0.73±20% | 0.35±20% | |
| Ke (RMS) (V/RPM) | 4.2x10-3 | 4.2x10-3 | 8.3x10-3 | 8.5x10-3 |
| Inertie du rotor (kg.cm²) | 0,24 | 0,48 | 0,72 | 0,96 |
| Coefficient de couple (Nm/A) | 0,06 | 0,06 | 0,09 | 0,12 |
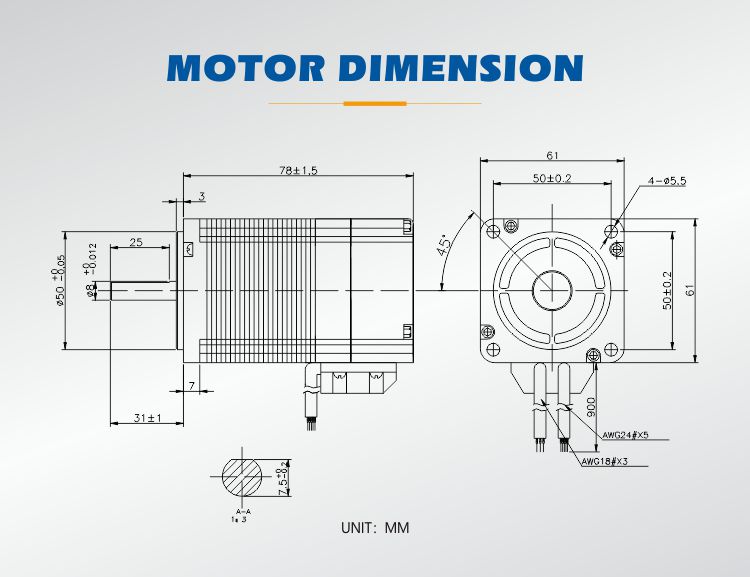
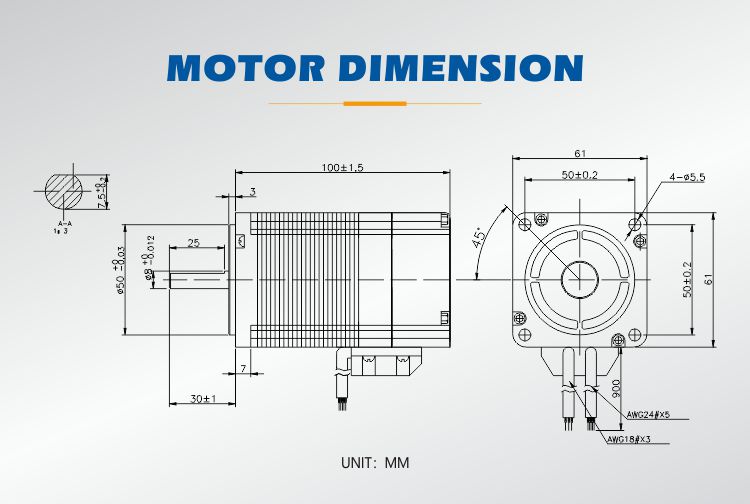
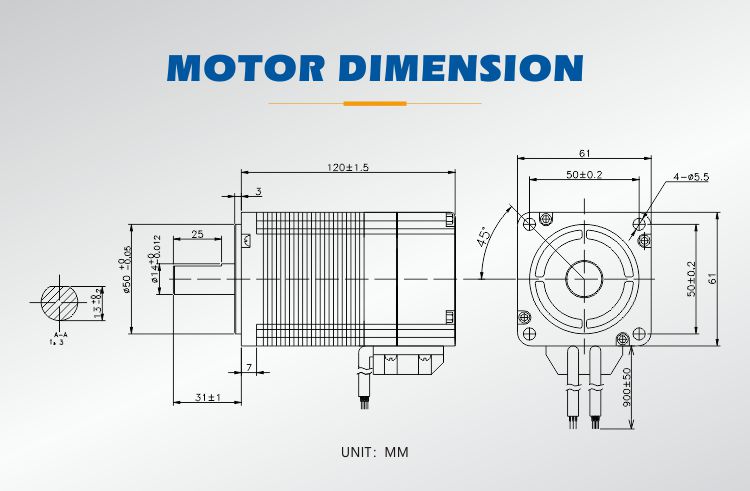
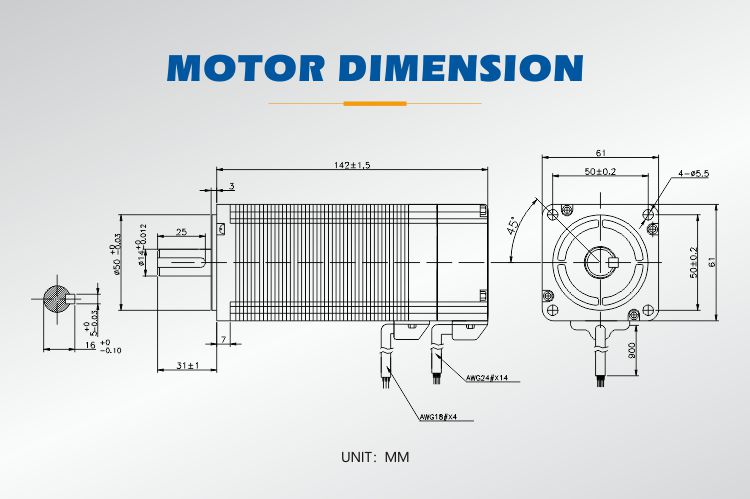
| Diamètre de l'arbre (mm) | 8 | 8 | 14 | 14 |
| Longueur de l'arbre (mm) | 31 | 30 | 31 | 31 |
| Longueur du moteur (mm) | 78 | 100 | 120 | 142 |
| poids (kg) | 0,85 | 1.25 | 1.5 | 2.05 |
| Pilote BLDC adapté | ZLDBL5010S | ZLDBL5015 | ZLDBL5010S | ZLDBL5015 |
Dimension
Application

Emballage

Dispositif de production et d'inspection

Qualification & Certificat

Bureau et Usine

Coopération

Catégories de produits
-

DM4022 ZLTECH 24V-50V DC 0.3A-2.2A pas à pas...
-
M4040 ZLTECH 2 phases 12V-40V DC 0.5A-4.0A brosse...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V marchepied intégré...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

ZLTECH 24V-36V 5A DC électrique Modbus RS485 bru...
-

ZLTECH 57mm Nema23 24VDC 1000-wrie boucle fermée ...





