ZLTECH 24V-48V DC 30A CAN RS485 pilote de contrôleur de servomoteur pour machine CNC





Le servomoteur est un élément important du contrôle de mouvement moderne et est largement utilisé dans les équipements d'automatisation, tels que les robots industriels et les centres d'usinage CNC.La technologie de servocommande, en tant que l'une des technologies clés pour le contrôle des machines-outils à commande numérique, des robots industriels et d'autres machines industrielles, a fait l'objet d'une attention considérable ces dernières années.
Le servomoteur utilise un processeur de signal numérique (DSP) comme noyau de contrôle, qui pourrait réaliser des algorithmes de contrôle plus complexes et réaliser la numérisation, la mise en réseau et l'intelligence.En même temps, il dispose de circuits de détection et de protection contre les défauts, notamment les surtensions, les surintensités, les surchauffes, les sous-tensions, etc.
La commande du servomoteur est divisée en boucle de position, boucle de vitesse et boucle de courant selon son objet de commande de l'extérieur vers l'intérieur.De manière correspondante, le servomoteur peut également prendre en charge le mode de contrôle de position, le mode de contrôle de vitesse et le mode de contrôle de couple.Le mode de contrôle du driver peut être donné de quatre manières : 1. Réglage de la quantité analogique, 2. Réglage interne du réglage des paramètres, 3. Réglage de l'impulsion + direction, 4. Réglage de la communication.
L'application du réglage interne du réglage des paramètres est relativement peu nombreuse, et elle est limitée et ajustée par étapes.
L'avantage d'utiliser le paramètre de quantité analogique est une réponse rapide.Il est utilisé dans de nombreuses occasions de haute précision et de haute réponse.Son inconvénient est qu'il n'y a aucune dérive, ce qui apporte des difficultés au débogage.Les systèmes d'asservissement européens et américains utilisent principalement cette méthode.
Le contrôle des impulsions est compatible avec les méthodes de signal courantes : CW/CCW (impulsion positive et négative), impulsion/direction, signal de phase A/B.Son inconvénient est une faible réponse.Les systèmes d'asservissement japonais et chinois utilisent principalement cette méthode.
Le paramètre de communication est actuellement la méthode de contrôle la plus couramment utilisée.Ses avantages sont un réglage rapide, une réponse rapide et une planification de mouvement raisonnable.Le réglage du mode de communication commun est la communication par bus, ce qui simplifie le câblage, et le protocole de communication diversifié offre également plus de choix aux clients.
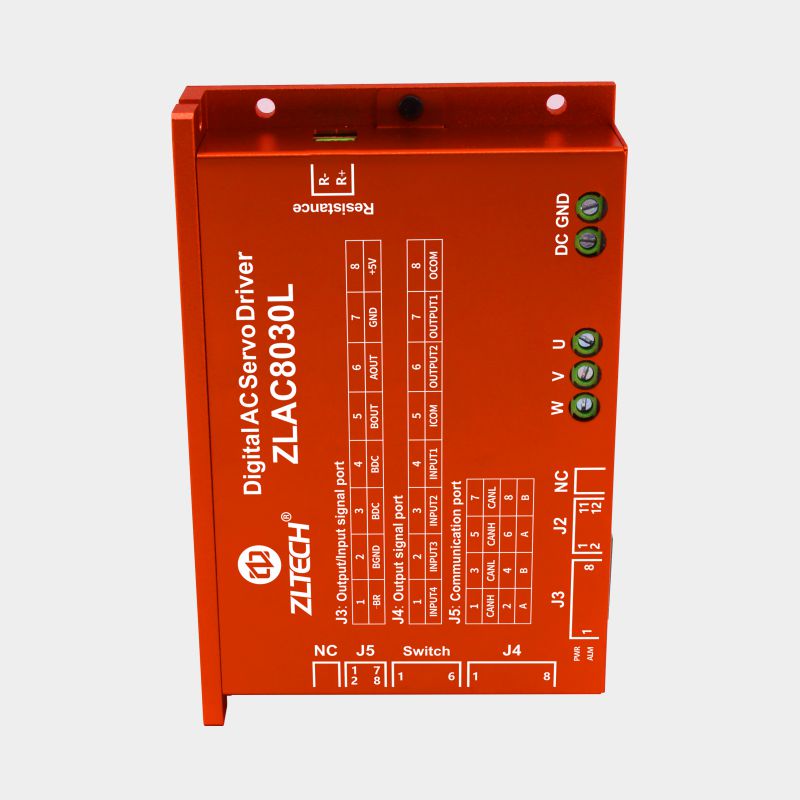
ZLAC8030 est un servomoteur numérique haute puissance et basse tension développé indépendamment par eux-mêmes.Son système a une structure simple et une intégration élevée.Il ajoute des fonctions de communication par bus et de contrôleur mono-axe.Il est principalement associé à des servomoteurs 500W-1000W.
Paramètres
| NOM DU PRODUIT | CHAUFFEUR SERBO |
| N/P | ZLAC8030L |
| TENSION DE SERVICE(V) | 24-48 |
| COURANT DE SORTIE(A) | NOMINAL 30A, MAX 60A |
| MÉTHODE DE COMMUNICATION | CANOPEN、RS485 |
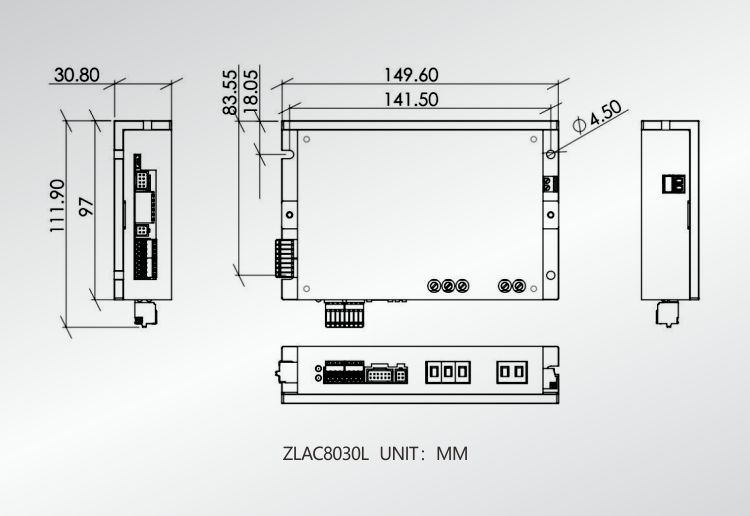
| DIMENSION(mm) | 149.5*97*30.8 |
| SERVO MOTEUR MOYEU ADAPTE | SERVOMOTEUR HUB HAUTE PUISSANCE |
Dimension
Application

Emballage

Dispositif de production et d'inspection

Qualification & Certificat

Bureau et Usine

Coopération

Catégories de produits
-

ZLTECH triphasé 60mm Nema24 24V 100W/200W/300W/40...
-

ZLTECH 42mm 24V 1.5A 0.5Nm CANopen intégré...
-

ZLTECH 6.5 pouces 24 V-48 V 150 W 120 kg BLDC électrique...
-

Moteur de moyeu ZLTECH 9.5 pouces 48V 20N.m pour l'agriculture...
-

Encodeur ZLTECH Nema23 CANopen intégré step-s...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V marchepied intégré...





